
 ACCUEIL
ACCUEIL
 ASSOCIATION
ASSOCIATION
 RÉALISATIONS
RÉALISATIONS
 EXPOSITIONS
EXPOSITIONS
 COLLECTION
COLLECTION
 HISTOIRE
HISTOIRE
 PUBLICATIONS
PUBLICATIONS
 PLAN DU SITE
PLAN DU SITE
 SERVICES
SERVICES
 CONTACT
CONTACT


© 2002-2020 - Aconit
Aviez-vous jamais entendu parler de l’informatique médicale robotisée ? Il s’agit d’une transformation radicale de la qualité des interventions chirurgicales qui mérite d’être connue !
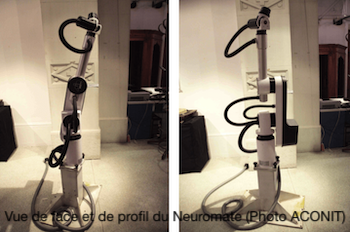
Une pièce exceptionnelle de la collection du Musée grenoblois des Sciences médicales - le Neuromate - témoigne de l’essor d’une discipline émergente au milieu des années 1980 : la chirurgie assistée par ordinateur. Cyrielle Ruffo, en service civique Mémoire et citoyenneté à l’ACONIT, en collaboration avec Xavier Hiron, nous en parlent dans un article publié sur ECHOSCIENCES.
Le Neuromate - l’un des tous premiers dispositifs de la nouvelle génération d’appareils de Chirurgie Assistée par Ordinateur (GMCAO) - a été créé pour des besoins de neurochirurgie par le professeur Alim-Louis Benabid, avec l’objectif de permettre des interventions chirurgicales les plus précises possible, en restant éloigné des zones cérébrales qui pourraient présenter un risque pour le patient. Il s’agit des techniques mêlant informatique, mathématiques appliquées et médecine.
La mise au point du robot Neuromate et du dispositif IGOR (Image Guided Operating Robot) a bouleversé la manière d’opérer les patients, en permettant notamment aux chirurgiens de repousser les limites de la science et de mieux prendre en charge le soin de nombreuses affections, en restituant une précision du geste que la main seule n’est pas capable d’obtenir.
Pour découvrir plus précisément comment le développement de la robotique médicale a amélioré la façon de soigner certaines pathologies, retrouvez l’article sur le site ECHOSCIENCES : "Destins d’objets scientifiques et techniques : Ce que nous révèle le prototype du Neuromate conservé au Musée grenoblois des Sciences Médicales"
Première publication :
Mise en ligne le jeudi 25 octobre 2018